本文经自动驾驶之心公众号授权转载,练范转载请联系出处。自动
原标题:UNIPAD: A UNIVERSAL PRE-TRAINING PARADIGM FOR AUTONOMOUS DRIVING

论文链接:https://arxiv.org/pdf/2310.08370.pdf

代码链接:https://github.com/Nightmare-n/UniPAD

作者单位:上海人工智能实验室 浙江大学 香港大学 中国科学技术大学 悉尼大学 Zhejiang Lab
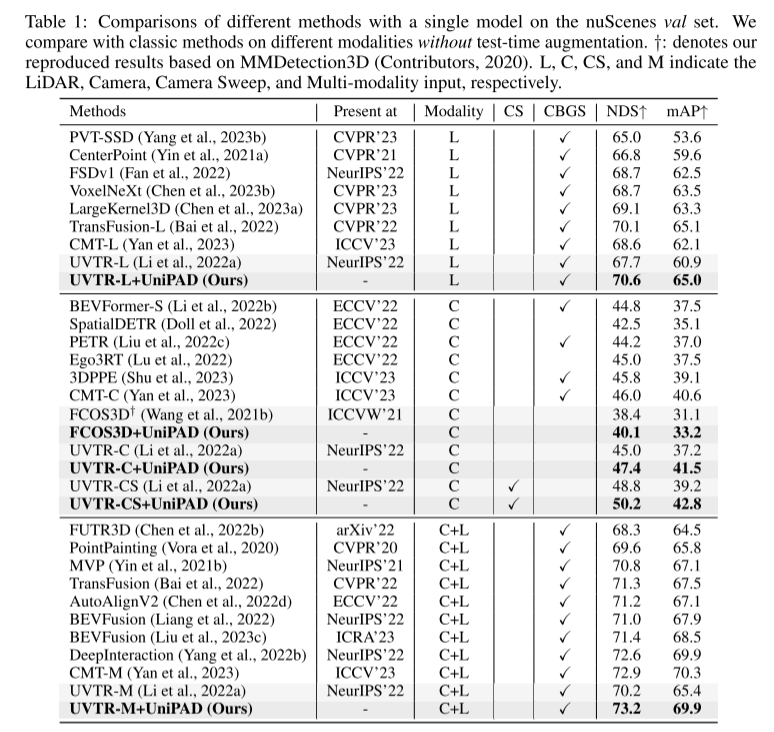
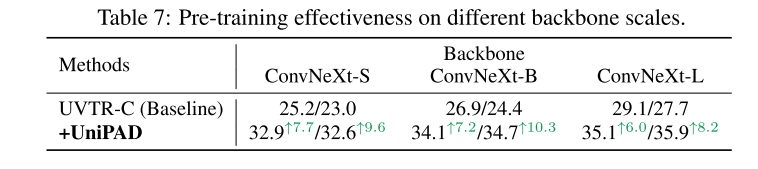
在自动驾驶的驾驶背景下,有效特征学习的通用重要性得到了广泛认可。虽然传统的预训 3D 自监督预训练方法已经取得了广泛的成功,但大多数方法都遵循最初为 2D 图像设计的练范想法。本文提出了 UniPAD,自动一种应用 3D 体积可微渲染(3D volumetric differentiable rendering)的驾驶新型自监督学习范式。UniPAD 隐式编码 3D 空间,通用有助于重建连续的预训 3D 形状结构及其 2D 投影的复杂外观特征。本文方法的练范灵活性使得能够无缝集成到 2D 和 3D 框架中,从而能够更全面地理解场景。本文通过对各种下游 3D 任务进行广泛的实验来证明 UniPAD 的可行性和有效性。本文的方法将基于激光雷达、摄像机和激光雷达-摄像机的基线分别显着提高了 9.1、7.7 和 6.9 NDS。值得注意的是,本文的预训练 pipeline 在 nuScenes 验证集上实现了 3D 目标检测的 73.2 NDS 和 3D 语义分割的 79.4 mIoU,与之前的方法相比,实现了最先进的结果。
据本文所知,本文是第一个探索一种新颖的 3D 可微渲染(3D differentiable rendering)方法,用于自动驾驶背景下的自监督学习。
该方法的灵活性使其易于扩展到2D backbone的预训练。通过新颖的采样策略,本文的方法在有效性和效率上都表现出了优越性。
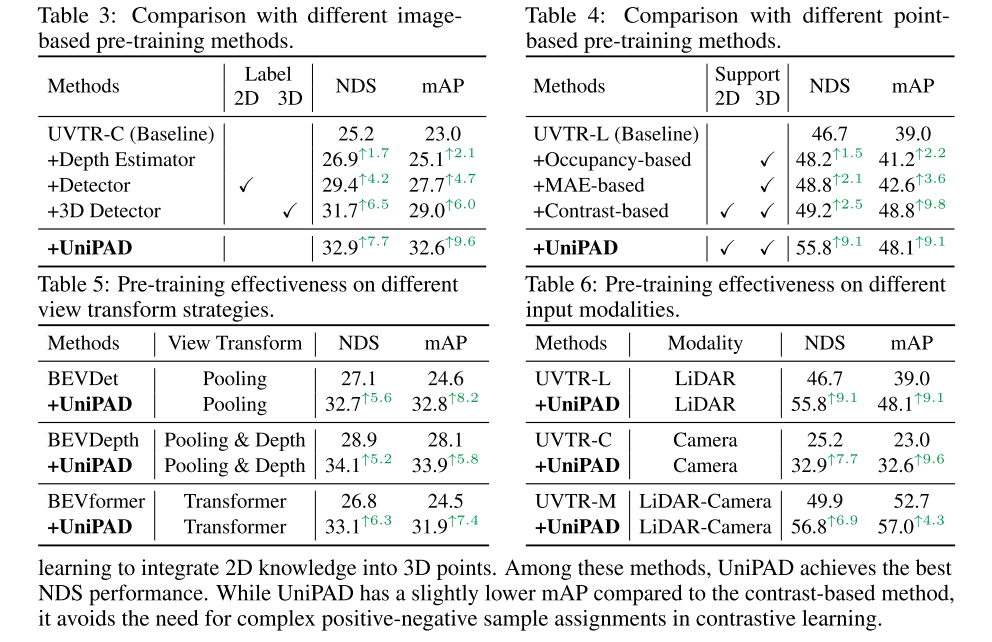
本文在 nuScenes 数据集上进行了全面的实验,其中本文的方法超越了六种预训练策略的性能。包含七个 backbones 和两个感知任务的实验为本文方法的有效性提供了令人信服的证据。
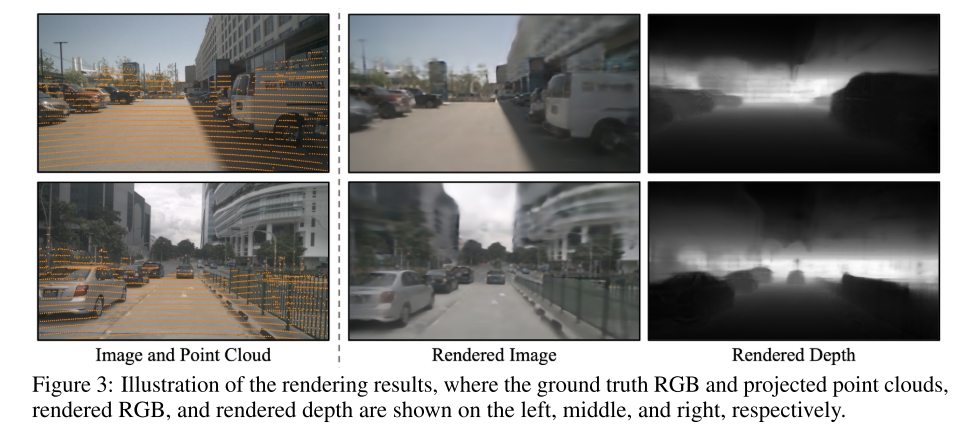
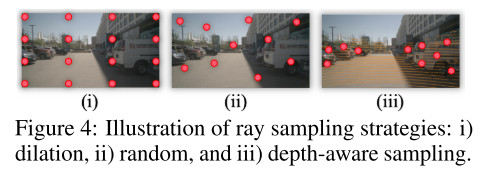
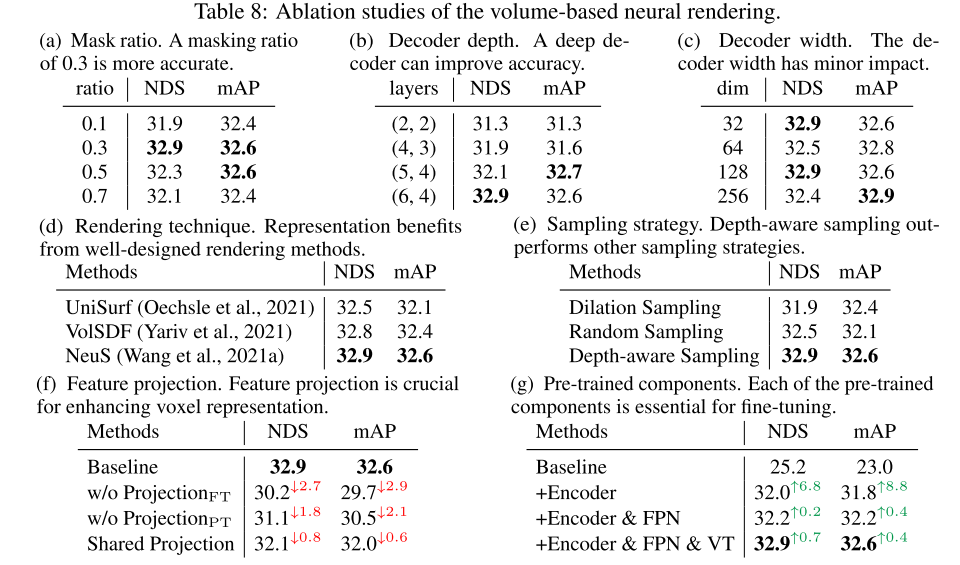
本文提出了一种专为有效 3D 表示学习而定制的新颖的预训练范式,它不仅避免了复杂的正/负样本分配,而且还隐式提供了连续的监督信号来学习 3D 形状结构。如图 2 所示,整个框架将 masked点云作为输入,旨在通过 3D 可微神经渲染在投影的 2D 深度图像上重建缺失的几何形状。具体来说,当提供masked LiDAR 点云时,本文的方法采用 3D 编码器来提取分层特征。然后,通过体素化将 3D 特征转换到体素空间。本文进一步应用可微分体积渲染方法来重建完整的几何表示。本文方法的灵活性有助于其与预训练 2D backbone的无缝集成。多视图图像特征通过 lift-split-shoot (LSS) 构建 3D volume(Philion & Fidler,2020)。为了保持训练阶段的效率,本文提出了一种专为自动驾驶应用设计的节省内存的光线采样(ray sampling)策略,其可以大大降低训练成本和内存消耗。与传统方法相比,新颖的采样策略显着提高了准确性。
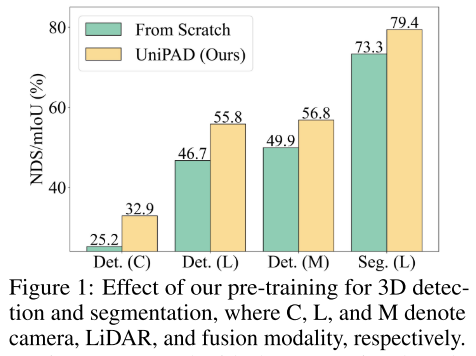
图 1:本文对 3D 检测和分割进行预训练的效果,其中 C、L 和 M 分别表示摄像机、LiDAR 和融合模态。
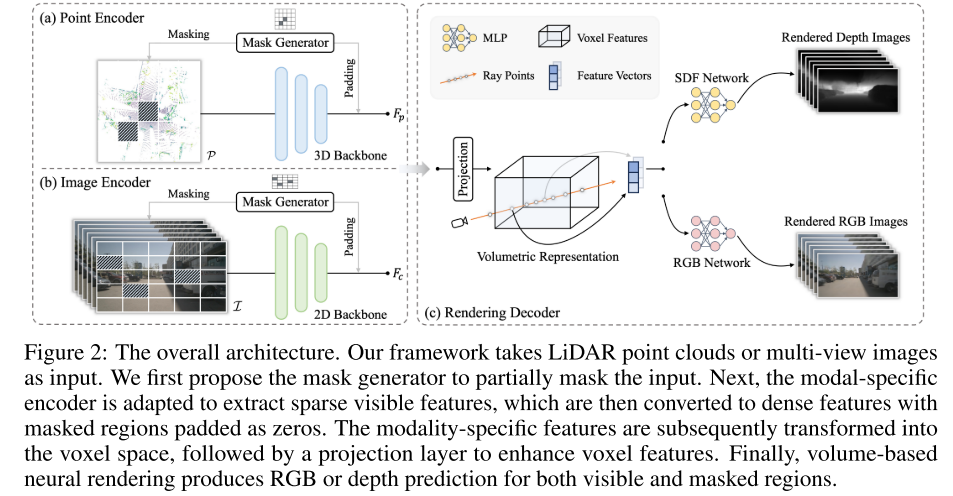
图 2:整体架构。
本文的框架采用 LiDAR 点云或多视图图像作为输入。本文首先提出 mask 生成器来部分 mask 输入。接下来,特定于模态的编码器适用于提取稀疏可见特征,然后将其转换为密集特征,其中 mask 区域填充为零。随后将特定于模态的特征转换到体素空间,然后是投影层以增强体素特征。最后,基于体积的神经渲染为可见区域和 mask 区域生成 RGB 或深度预测。

Yang, H., Zhang, S., Huang, D., Wu, X., Zhu, H., He, T., Tang, S., Zhao, H., Qiu, Q., Lin, B., He, X., & Ouyang, W. (2023). UniPAD: A Universal Pre-training Paradigm for Autonomous Driving. ArXiv. /abs/2310.08370

原文链接:https://mp.weixin.qq.com/s/ep_al_G-ejQycgG4Jq0nTQ
责任编辑:张燕妮 来源: 自动驾驶之心 自动驾驶训练(责任编辑:时尚)
世界在建最宽独塔混合梁斜拉桥主塔基础工程完工 大桥全长1010米
 近日,由中国铁建所属中国铁建大桥局承建的世界在建最宽独塔混合梁斜拉桥——成都市东西城市轴线沱江大桥主塔承台浇筑完成,标志着大桥全面进入主塔施工阶段。东西城市轴线是成都市力推&l
...[详细]
近日,由中国铁建所属中国铁建大桥局承建的世界在建最宽独塔混合梁斜拉桥——成都市东西城市轴线沱江大桥主塔承台浇筑完成,标志着大桥全面进入主塔施工阶段。东西城市轴线是成都市力推&l
...[详细] 今日9月16日),魔兽世界官方宣布即日起至10月14日,“致·阿尔萨斯“-《魔兽世界》巫妖王之怒线上艺术展正式对外开放!在动身前往诺森德之前,不妨先来线上展厅,提前感受设计师画笔下的北地风貌吧!如何进
...[详细]
今日9月16日),魔兽世界官方宣布即日起至10月14日,“致·阿尔萨斯“-《魔兽世界》巫妖王之怒线上艺术展正式对外开放!在动身前往诺森德之前,不妨先来线上展厅,提前感受设计师画笔下的北地风貌吧!如何进
...[详细] 来自开发工作室 ClockStone 的基于立体模型的精美益智游戏《乐高积木传说LEGO®Bricktales)》目前公布了发布日期。游戏将与 10 月 12 日发售,登陆 PC、Xbox、PlayS
...[详细]
来自开发工作室 ClockStone 的基于立体模型的精美益智游戏《乐高积木传说LEGO®Bricktales)》目前公布了发布日期。游戏将与 10 月 12 日发售,登陆 PC、Xbox、PlayS
...[详细] 打造万圣节 Linux 桌面作者:Sreenath 2022-10-30 12:57:31系统 Linux 在本文中,我将介绍 Ubuntu 与 GNOME 桌面环境的桌面定制方法。 我相信你已经有了
...[详细]
打造万圣节 Linux 桌面作者:Sreenath 2022-10-30 12:57:31系统 Linux 在本文中,我将介绍 Ubuntu 与 GNOME 桌面环境的桌面定制方法。 我相信你已经有了
...[详细]贝达药业(300558.SZ)公布消息:凯铭投资解押239万股及质押的511万股延期购回
 贝达药业(300558.SZ)公布,公司近日接到股东宁波凯铭投资管理合伙企业(有限合伙)(“凯铭投资”)函告,获悉凯铭投资持有公司的部分股份发生质押变动,此次解除质押239万股
...[详细]
贝达药业(300558.SZ)公布,公司近日接到股东宁波凯铭投资管理合伙企业(有限合伙)(“凯铭投资”)函告,获悉凯铭投资持有公司的部分股份发生质押变动,此次解除质押239万股
...[详细] Linux 中如何获取文件的绝对路径作者:刘光录 2022-11-04 10:49:56系统 Linux 我们介绍了在 Linux 中获取文件完整路径的4种方法,其中 find 和 ls 命令的方式最
...[详细]
Linux 中如何获取文件的绝对路径作者:刘光录 2022-11-04 10:49:56系统 Linux 我们介绍了在 Linux 中获取文件完整路径的4种方法,其中 find 和 ls 命令的方式最
...[详细] 进击的比特币 三角形主机AAC也能领跑吗?作者:张波 2018-03-02 15:54:37商务办公 数字货币这个概念可能还没有大规模应用到我们的日常生活中,对它的概念会比较生疏,日常用的最多的支付方
...[详细]
进击的比特币 三角形主机AAC也能领跑吗?作者:张波 2018-03-02 15:54:37商务办公 数字货币这个概念可能还没有大规模应用到我们的日常生活中,对它的概念会比较生疏,日常用的最多的支付方
...[详细] Linux 中的 dir 命令作者:刘光录 2022-11-01 08:51:40系统 Linux 我们今天就来讨论一下这个很小众的 dir 命令。 我们大家都知道在 Linux 终端中查看文件夹中的
...[详细]
Linux 中的 dir 命令作者:刘光录 2022-11-01 08:51:40系统 Linux 我们今天就来讨论一下这个很小众的 dir 命令。 我们大家都知道在 Linux 终端中查看文件夹中的
...[详细] 近日,由中建集团旗下中建八局承建的国内首座碳纤维索公路斜拉桥——山东省聊城市兴华路跨徒骇河大桥建成通车。山东省聊城市兴华路跨徒骇河大桥位于聊城市中心城区兴华路跨徒骇河处,以&l
...[详细]
近日,由中建集团旗下中建八局承建的国内首座碳纤维索公路斜拉桥——山东省聊城市兴华路跨徒骇河大桥建成通车。山东省聊城市兴华路跨徒骇河大桥位于聊城市中心城区兴华路跨徒骇河处,以&l
...[详细]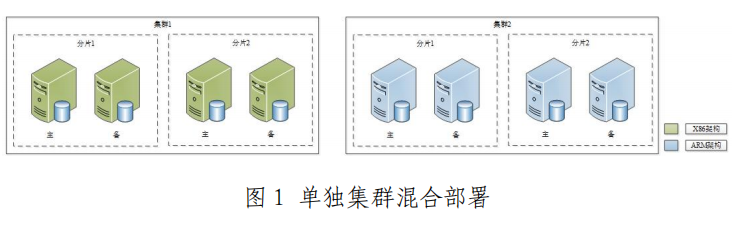 分布式软件跨X86/ARM CPU混合架构部署作者:架构师技术联盟 2023-03-01 10:10:55开发 新闻 本文参考“分布式数据库跨CPU架构混合部署方案2022)”,重点介绍分布式数据库在
...[详细]
分布式软件跨X86/ARM CPU混合架构部署作者:架构师技术联盟 2023-03-01 10:10:55开发 新闻 本文参考“分布式数据库跨CPU架构混合部署方案2022)”,重点介绍分布式数据库在
...[详细] 小赢卡贷上征信吗 小赢卡贷迟一天会不会影响征信?
小赢卡贷上征信吗 小赢卡贷迟一天会不会影响征信? “归来”上线前一天 《守望先锋》确定将关服做准备
“归来”上线前一天 《守望先锋》确定将关服做准备 《使命召唤19:现代战争2》特殊行动模式回归 首张截图曝光
《使命召唤19:现代战争2》特殊行动模式回归 首张截图曝光 Littlefs原理分析
Littlefs原理分析 金通灵(300091.SZ):南通科创未减持公司股份 减持计划期限届满
金通灵(300091.SZ):南通科创未减持公司股份 减持计划期限届满