
本文将对Linux内核中的源码SPI驱动源码进行分析,包括SPI驱动框架的分析基本结构、各文件的核中作用、重要的驱动数据结构和函数等。

SPI(Serial Peripheral Interface)是源码一种串行通信接口,常常用于与数字外设进行通信,分析如传感器、核中存储器、驱动网卡等。源码Linux内核提供了SPI驱动框架,分析用于向上层应用程序提供SPI接口。核中本文将对该框架进行深入分析。驱动

在Linux内核中,SPI驱动框架的代码位于/drivers/spi目录下。该目录下的源文件主要包括以下几个:
这些驱动程序分别对应不同的SPI控制器。其中,spi.c是SPI驱动的核心文件,提供了SPI驱动框架的基本结构和主要函数。
SPI驱动框架的初始化主要在spi_init()函数中完成。该函数首先调用spi_bus_type_init()函数,注册SPI设备总线,然后向/sys/class下的spi_master目录中创建spi设备目录,最后调用probe_master()函数,搜索当前系统中的SPI设备并添加到bus层中。该函数的代码如下:
static int __init spi_init(void){ int status;status = spi_bus_type_init();if (status)goto out;status = class_register(&spi_master_class);if (status)goto bus_unregister;status = spi_proc_init();if (status)goto class_unregister;status = spi_gpio_register_board_info(NULL, 0);if (status)goto proc_cleanup;status = spi_read_configfile();if (status)goto board_cleanup;status = spi_master_probe_devices();if (status)goto board_cleanup;printk(KERN_INFO "%s\n", spi_revision);return 0;board_cleanup:spi_board_cleanup();proc_cleanup:spi_proc_cleanup();class_unregister:class_unregister(&spi_master_class);bus_unregister:spi_bus_type_exit();out:return status;}当SPI总线设备(spi_master)被发现并添加到bus层时,会自动调用spi_master_add()函数,该函数会为SPI总线设备创建一个spi_master结构体,并将其添加到bus层中。
static int spi_master_add(struct spi_master *master){ struct device *dev = master->dev.parent;struct spi_controller *ctlr = master->controller;mutex_lock(&spi_mutex);/*• Implementation restriction: each SPI MASTER talks with other• devices at constant signal levels, which don't change once• operation starts. We don't provide any synchronization• primitives that would be necessary for anything else.*/if (master->num_chipselect)dev_warn(dev, "num_chipselect should == 1 when !is_slave\n");if (!ctlr) { ctlr = kzalloc(sizeof(struct spi_controller), GFP_KERNEL);if (!ctlr) { mutex_unlock(&spi_mutex);return -ENOMEM;}ctlr->master = master;master->controller = ctlr;master->bits_per_word_mask = 0xFFFF;if (!spi_controller_is_slave(master)) { ctlr->max_speed_hz = spi_max_speed_hz(&ctlr->dev, master);ctlr->setup = spi_master_setup;ctlr->transfer_one = spi_transfer_one;} else { ctlr->max_speed_hz = master->max_speed_hz;ctlr->setup = spi_slave_setup;ctlr->transfer_one = spi_transfer_one_slave;}ctlr->bits_per_word_mask = master->bits_per_word_mask;ctlr->flags = 0;ctlr->mode_bits = master->mode_bits;if (spi_controller_is_slave(master)) { ctlr->mode_bits = 0;ctlr->flags = SPI_CONTROLLER_SLAVE;ctlr->bus_num = spi_slave_controller_id++;idr_init(&ctlr->idr);} else { ctlr->mode_bits &= ctlr->controller_ops->get_mode_bits;ctlr->flags |= SPI_CONTROLLER_MASTER;ctlr->bus_num = spi_master_controller_id++;}dev_set_drvdata(dev, master);dev_info(dev, "registered, %s%s%s%s%s\n",ctlr->flags & SPI_CONTROLLER_MASTER ? "master" : "",ctlr->flags & SPI_CONTROLLER_SLAVE ? "slave" : "",ctlr->flags & SPI_CONTROLLER_CS_WORD ? "cs-high" : "",ctlr->flags & SPI_CONTROLLER_NEEDS_POLL ? ", polling" : "",ctlr->mode_bits ? ", mode " : "");list_add_tail(&ctlr->list, &ctlr_list);}mutex_unlock(&spi_mutex);return 0;}当SPI总线设备从bus层中删除时,会自动调用spi_master_del()函数,该函数会删除spi_master结构体并释放相关资源。
static int spi_master_del(struct spi_master *master){ int my_bus_num = master->controller->bus_num;mutex_lock(&spi_mutex);if (my_bus_num < 0) { /* not yet attached */mutex_unlock(&spi_mutex);return -EINVAL;}if (!spi_controller_is_slave(master)) { if (spi_master_get(master)) { mutex_unlock(&spi_mutex);return -EINVAL;}}dev_info(&master->dev, "removed\n");spi_controller_cleanup(master->controller);kfree(master->controller);return 0;}spi_device结构体表示一个SPI设备,包含了设备的名称、片选信号、总线速率、数据位数、SPI传输设置等信息。该结构体被定义在include/linux/spi/spi.h头文件中,其定义如下:
struct spi_device { struct device dev;spinlock_t regs_lock;const struct spi_device *next;u32 max_speed_hz;u8 chip_select;u8 mode;u8 bit_order;u16 flags;u32 irq;struct mutex io_mutex;/* RT signal stuff */struct rt_mutex rt;struct spi_controller *controller;};spi_transfer结构体表示一次SPI传输,包含了传输的缓冲区、字节长度、传输设置等信息以及一个回调函数,用于在传输完成时通知上层应用程序。该结构体被定义在include/linux/spi/spi.h头文件中,其定义如下:
struct spi_transfer { const void *tx_buf;void *rx_buf;unsigned len;u32 speed_hz;u16 delay_usecs;u8 bits_per_word;/* Used internally, by spi_sync() and the SPI core code */u8 cs_change:1;u8 do_read:1;u8 tx_nbits:6; /* internal, for packing only */u8 rx_nbits:6; /* internal, for packing only */u16 rdy_for_tx:1;u16 rdy_for_rx:1;u16 cs_change_delay:14;u16 large_buf:1;u8 *tx_buf_wr;u8 *rx_buf_wr;void *private_data;void (*complete)(void *private_data);};spi_sync()函数用于同步传输数据,该函数会等待传输完成并返回传输结果。该函数的代码如下:
int spi_sync(struct spi_device *spi, struct spi_transfer *t){ DECLARE_COMPLETION_ONSTACK(done);int status;t->complete = spi_complete;t->private_data = &done;t->rdy_for_tx = t->rdy_for_rx = 0;t->cs_change = spi->controller->cs_gpiod ? 1 : 0;status = spi_async(spi, t);if (status == 0) { wait_for_completion(&done);status = t->status;if (status == -ETIMEDOUT)status = -EIO;}return status;}spi_async()函数用于异步传输数据,该函数会启动SPI传输,并立即返回,不等待传输完成。该函数的代码如下:
int spi_async(struct spi_device *spi, struct spi_transfer *t){ struct spi_message msg;int status;memset(&msg, 0, sizeof(msg));msg.spi = spi;msg.complete = spi_complete;msg.context = t;msg.state = NULL;msg.is_dma_mapped = false;spi_prepare_message(&msg, t);status = spi_async_locked(spi_get_parent_master(spi), &msg);if (status == -EBUSY)return -EAGAIN;t->status = status;if (msg.is_dma_mapped)dma_unmap_sg(&spi->dev, msg.sgbuf, msg.nents, msg.direction);if (msg.is_dma_mapped && msg.context && spi_need_dma_clean_up_on_error()) { struct spi_controller *ctlr = spi->controller;struct spi_transfer *xfer = msg.contexteif (xfer->tx_buf && ctlr->dma_tx && ctlr->dma_tx->device->dev) { dma_sync_sg_for_device(ctlr->dma_tx->device->dev,msg.sgbuf,msg.nents,(ctlr->dma_tx_dir == DMA_MEM_TO_DEV) ?DMA_TO_DEVICE : DMA_FROM_DEVICE);dma_unmap_sg(ctlr->dma_tx->device->dev,msg.sgbuf,msg.nents,ctlr->dma_tx_dir);}if (xfer->rx_buf && ctlr->dma_rx && ctlr->dma_rx->device->dev) { dma_sync_sg_for_device(ctlr->dma_rx->device->dev,msg.sgbuf,msg.nents,(ctlr->dma_rx_dir == DMA_MEM_TO_DEV) ?DMA_TO_DEVICE : DMA_FROM_DEVICE);dma_unmap_sg(ctlr->dma_rx->device->dev,msg.sgbuf,msg.nents,ctlr->dma_rx_dir);}}if (status == -EINPROGRESS || status == -EBUSY) { status = 0;} else if (unlikely(status)) { dev_err(spi->dev.parent, "%s: spi_sync failed with status %d\n",func, status);}return status;}本文分析了Linux内核中的SPI驱动源码,介绍了SPI驱动框架的基本结构、spi.c的结构和作用以及SPI驱动中的重要数据结构和函数。通读本文后,读者应该了解了SPI设备的工作原理和Linux内核中提供的SPI驱动框架的实现方式,理解了相关代码的运行过程和涉及的系统调用,有助于读者熟练掌握SPI驱动的编写技巧。
责任编辑:姜华 来源: 今日头条 Linux内核SPI驱动(责任编辑:热点)
中国海油牵头签订国内最大规模液化天然气船舶建造项目 建造金额约160亿元
 4月28日,中国海油以“云签约”方式牵头签订6艘液化天然气(LNG)运输船建造项目合同(下称船运项目)。加上今年1月初签订的6艘建造合同,该项目将开工建造12艘LNG运输船,建
...[详细]
4月28日,中国海油以“云签约”方式牵头签订6艘液化天然气(LNG)运输船建造项目合同(下称船运项目)。加上今年1月初签订的6艘建造合同,该项目将开工建造12艘LNG运输船,建
...[详细] 任天堂宣布他们将于北京时间2023年4月20日召开新一期独立游戏发布会,美版将于北京时间4月20日0点播出,时长约20分钟;日版则将于北京时间4月20日晚19点播出,时长约25分钟。发布会上将公布新的
...[详细]
任天堂宣布他们将于北京时间2023年4月20日召开新一期独立游戏发布会,美版将于北京时间4月20日0点播出,时长约20分钟;日版则将于北京时间4月20日晚19点播出,时长约25分钟。发布会上将公布新的
...[详细] 昨晚,优酷在上海举办主题为“2016优酷奇妙夜”的VR战略发布会。对于这场发布会“发布”了什么,小编觉得合一集团董事长兼CEO古永锵在会后的采访中总结得很清楚:“我们东西已经出来了,产品出来了,内容也
...[详细]
昨晚,优酷在上海举办主题为“2016优酷奇妙夜”的VR战略发布会。对于这场发布会“发布”了什么,小编觉得合一集团董事长兼CEO古永锵在会后的采访中总结得很清楚:“我们东西已经出来了,产品出来了,内容也
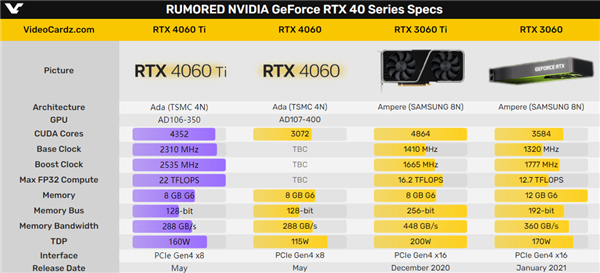
...[详细] RTX 4070之后,NVIDIA新卡的下一站自然是更主流的RTX 4060 Ti、RTX 4060。此前有消息称,它俩将在5月份发布,目前看也有可能会在5月底的台北电脑展上。TechPowerUp显
...[详细]
RTX 4070之后,NVIDIA新卡的下一站自然是更主流的RTX 4060 Ti、RTX 4060。此前有消息称,它俩将在5月份发布,目前看也有可能会在5月底的台北电脑展上。TechPowerUp显
...[详细] 2021年11月15日,中国建筑材料流通协会发布的全国建材家居景气指数(以下简称“BHI”)显示,10月份为169.80,环比上涨31.17点,同比上涨59.03点。BHI显示
...[详细]
2021年11月15日,中国建筑材料流通协会发布的全国建材家居景气指数(以下简称“BHI”)显示,10月份为169.80,环比上涨31.17点,同比上涨59.03点。BHI显示
...[详细] 据相关媒体报道,在刚刚过去的五一节,最忙碌的人除了那些仍然坚守在工作岗位上服务着游客们的岗位之外,恐怕就属vivo智能手机的导购们了,一方面因为vivo近期发布的够快才畅快vivo X6S&X
...[详细]
据相关媒体报道,在刚刚过去的五一节,最忙碌的人除了那些仍然坚守在工作岗位上服务着游客们的岗位之外,恐怕就属vivo智能手机的导购们了,一方面因为vivo近期发布的够快才畅快vivo X6S&X
...[详细] 近日,一位《魔兽世界》开发者在推特上发泄了他对暴雪的不满,他声称他们工作室正在流失大量优秀人才,并且公司高层完全无视了他们的意见。在最近又失去一位团队成员后,《魔兽世界》开发者Adam“Glaxigr
...[详细]
近日,一位《魔兽世界》开发者在推特上发泄了他对暴雪的不满,他声称他们工作室正在流失大量优秀人才,并且公司高层完全无视了他们的意见。在最近又失去一位团队成员后,《魔兽世界》开发者Adam“Glaxigr
...[详细] 2016全球移动互联网大会GMIC),大数据开放成为一个新的议题。4月28日,在“聚变●腾讯浏览服务升级发布会”上,腾讯副总裁钟翔平表示:“行业壁垒导致移动互联网行业存在数据信息孤岛,腾讯将开放亿万级
...[详细]
2016全球移动互联网大会GMIC),大数据开放成为一个新的议题。4月28日,在“聚变●腾讯浏览服务升级发布会”上,腾讯副总裁钟翔平表示:“行业壁垒导致移动互联网行业存在数据信息孤岛,腾讯将开放亿万级
...[详细]非凡中国(08032.HK)因购股权获行使发行2000万股 每股发行价港币0.478元
 非凡中国(08032.HK)发布公告,2021年3月15日-3月16日,根据公司于2010年6月29日采纳的购股权计划,非公司董事的购股权持有人因行使所获授予的购股权而获合计发行2000万股股份,每股
...[详细]
非凡中国(08032.HK)发布公告,2021年3月15日-3月16日,根据公司于2010年6月29日采纳的购股权计划,非公司董事的购股权持有人因行使所获授予的购股权而获合计发行2000万股股份,每股
...[详细] 国外mod制作者“XilaMonstrr”为《赛博朋克2077》制作了许多4K角色材质包,大小约为1.5GB,对众多NPC角色的材质纹理进行了大修。这些材质包应该与HD Reworked Projec
...[详细]
国外mod制作者“XilaMonstrr”为《赛博朋克2077》制作了许多4K角色材质包,大小约为1.5GB,对众多NPC角色的材质纹理进行了大修。这些材质包应该与HD Reworked Projec
...[详细] 北交所11月13日开市通关测试 上市公司将达81家
北交所11月13日开市通关测试 上市公司将达81家 《守望先锋2》新英雄“命梭”官方操作简化方案下周上线
《守望先锋2》新英雄“命梭”官方操作简化方案下周上线 《木卫四协议》新更新增加肢解模式 容量大小12GB
《木卫四协议》新更新增加肢解模式 容量大小12GB 央行上海总部:10月人民币贷款增加357亿元 住户部门贷款增加202亿元
央行上海总部:10月人民币贷款增加357亿元 住户部门贷款增加202亿元
